
- Usable Devices :
-
- Found at :
 www.adafruit.com
www.adafruit.com
 a.co
www.aliexpress.com
a.co
www.aliexpress.com
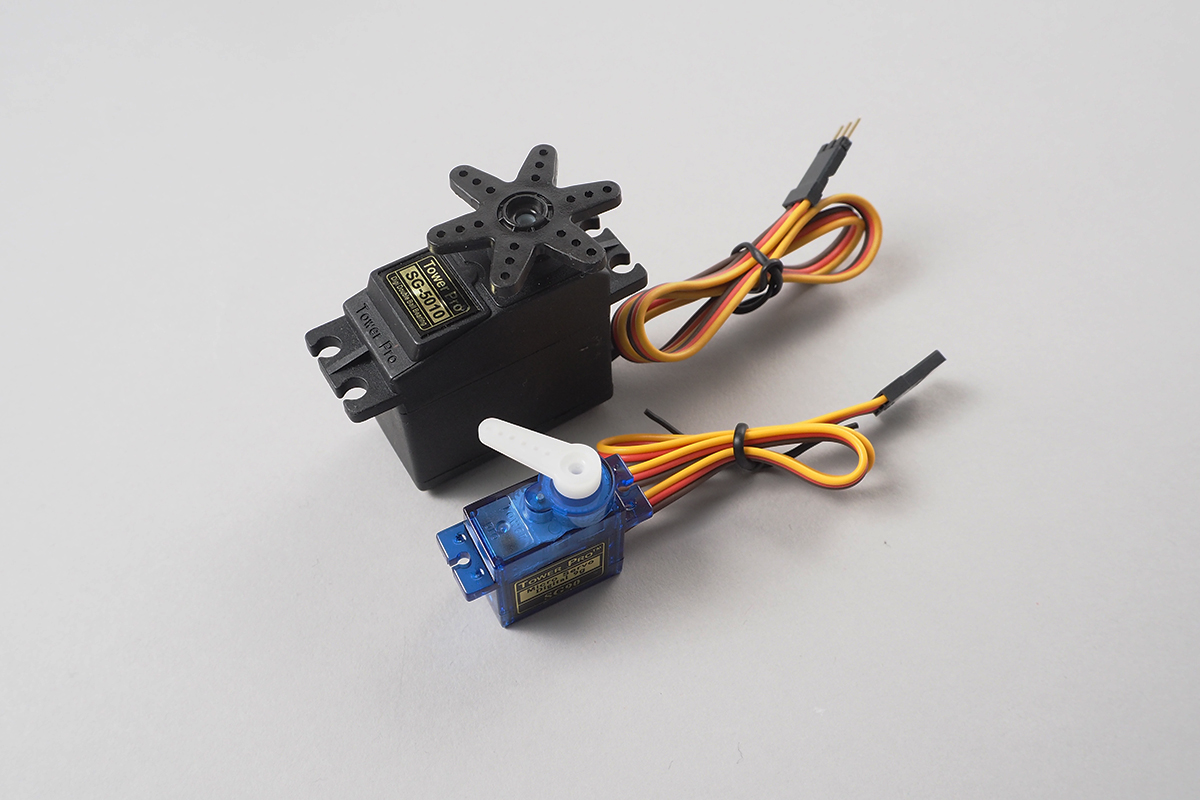
ServoMotor
RC Servo Motor is computer embeded geard motor.
It keep "Angle".
You just need to send a angle data to servomotor.

About Motor Power Supply
Some RC Servo Motors can be connected obniz Board directly even power supply.
But Some (Especcialy tiny) Motors tends to leak vcc. So obniz Board would recognize as over current situation and stop supplying.
If it occure, our recommendations are
- (Recommended) connect power supply to other resource. (J1 pin on obniz Board can be use. It's USB direct)
- Connect throught the bread board. (It's resistance is not so low. So, it can prevent over current detection)
Servomotors which vcc can be driven directly from obniz Board io
| Maker | SKU |
|---|---|
| Tower Pro | SG-5010 |
| Tower Pro | MG92B |
| Tower Pro | MG90S |
| Tower Pro | MG90D |
| Tower Pro | SG90 |
| Tower Pro | SG92R |
| GWS | S35STD |
Servomotors which vcc can not be driven directly from obniz Board io
| Maker | SKU |
|---|---|
| Quimat | QKY66-5 |
| FEETECH | FS90R |
obniz.wired("ServoMotor", {[vcc, gnd, signal, pwm]})
Connect three feet to obniz Board. gnd, vcc and signal, respectively, and the placement is different depending on the manufacturere of motor.
This is commonly used pattern.
obniz Board set include this pattern's servomotor.
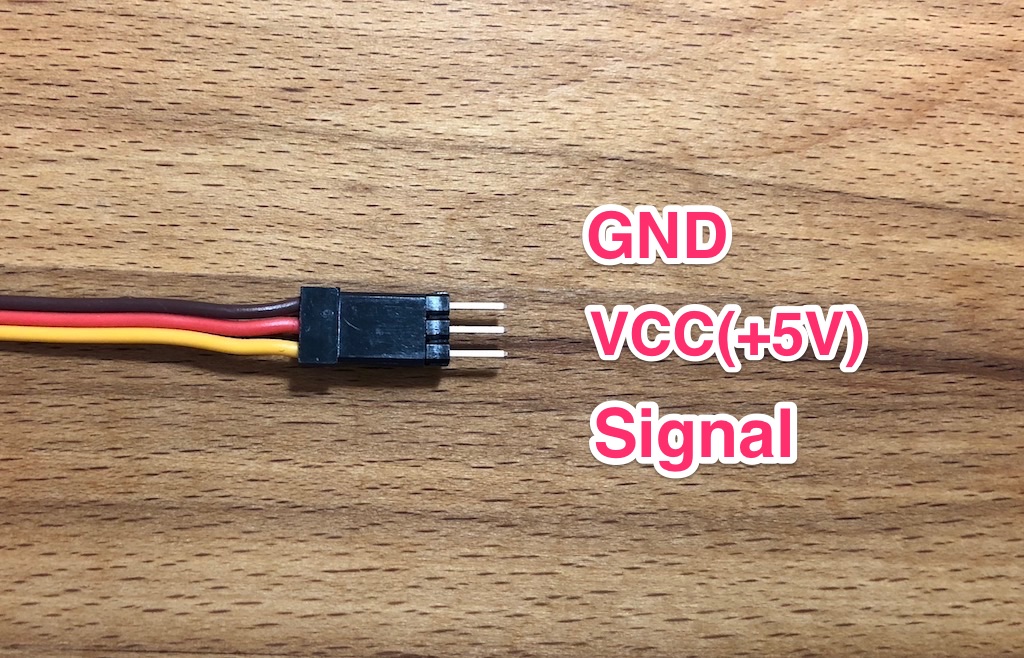
If you connect gnd ,vcc and signal to obniz Board 0, 1, 2 respectively, write a code as follows.
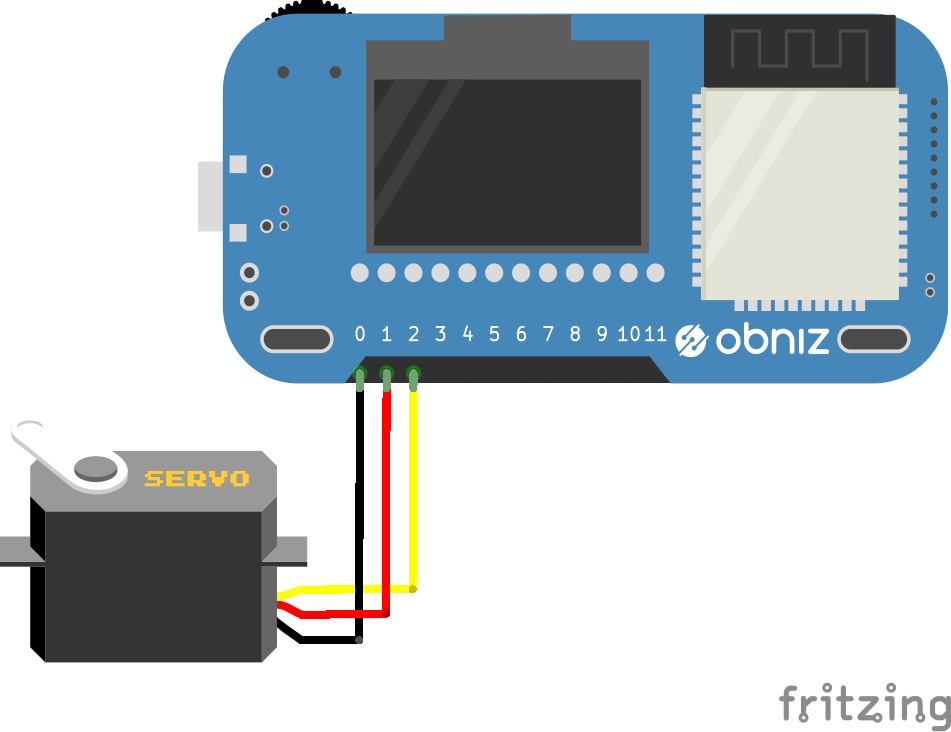
// Javascript Example
var servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
servo.angle(90.0); // half position
vcc and gnd is optional. When you connect vcc and gnd to other way, then just specify signal.
var servo = obniz.wired("ServoMotor", {signal:2});
Or you can use pwm object.
var pwm = obniz.getFreePwm();
pwm.start({io:0})
var servo = obniz.wired("ServoMotor", {pwm:pwm});
angle(degree)
Change the motor angle.
angle : 0 - 180 degree
// Javascript Example
var servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
servo.angle(90.0); // half position
range = {min, max}
Adjusting output pulse length.
By default 0.5 to 2.4 msec pulse will be generated regarding angle 0 to 180 degree.
// Javascript Example
var servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
servo.range = {
min: 0.8,
max: 2.4
}
servo.angle(90.0); // half position
on();
Turn on the power.
When you call wired function, it automatically turn on.
// Javascript Example
var servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
servo.angle(90.0); // half position
servo.off();
servo.on();
off();
Turn off the power.
When you call wired function, it automatically turn on.
// Javascript Example
var servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
servo.angle(90.0); // half position
servo.off();
Supported from: obniz.js 3.5.0